Как-то не понятно. Что такое дельта угла и как эта дельта равна нулю. Угол равен 0 там где sin = 0, а cos = 1. На синусном датчике, в твоей схеме включения, Uпит./2, а на косинусном датчике Uпит. SIN и COS функции нелинейные. Если ты попытаешься выбрать маломальски линейный участок у синуса, то у косинуса для этого угла будет самый нелинейный участок.
Как же все-таки мы вычисляем угол?
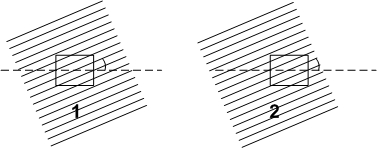
Дельта - разница, здесь речь об отличии текущего положения НД от "нулевого". График зависимости этой разницы от положения диска - прямая, никакую другую линейную зависимость я не упоминал и из синусоиды её выдернуть не пытаюсь. Смысл: знаем угол начального положения диска (константа) и знаем отклонение от этого угла в текущий момент, из этого определяем положение диска и величину выходного напряжения.
Можно было не заморачиваться на угол начального положения НД и обойтись только фактическим, но тогда калибровать устройство пришлось бы индивидуально на каждой машине, а так - устанавливаем подстроечником начальное положение и усё.
А насчет способа вычисления угла - угол вычисляет сенсор, далее есть даташит на KMZ, есть куча информации об обработке её сигналов, почитайте если интересно или всё ещё что-то не понятно, всё сделано согласно этой методики без каких-либо отступлений, тем более, раз вы уже занимались этой темой, то зачем я буду это повторять.
Сообщение отредактировал vital877: 13 April 2017 - 02:31