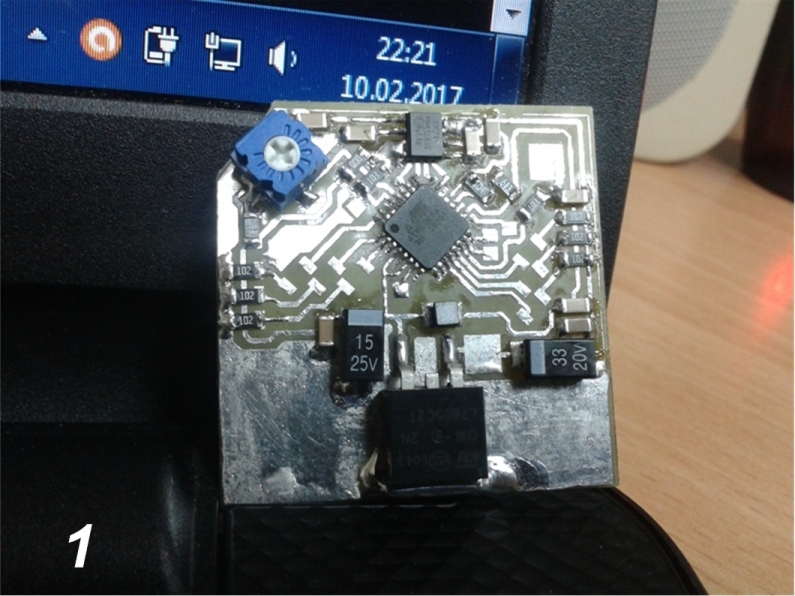
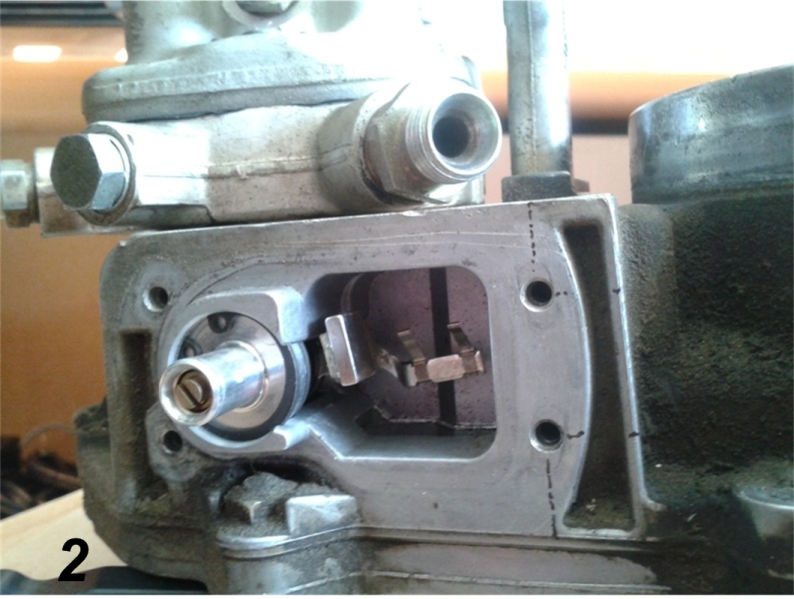
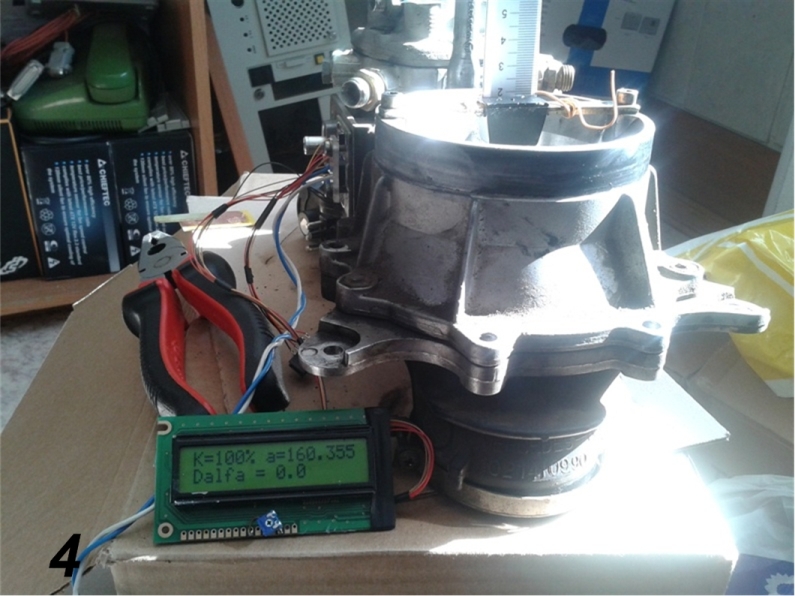
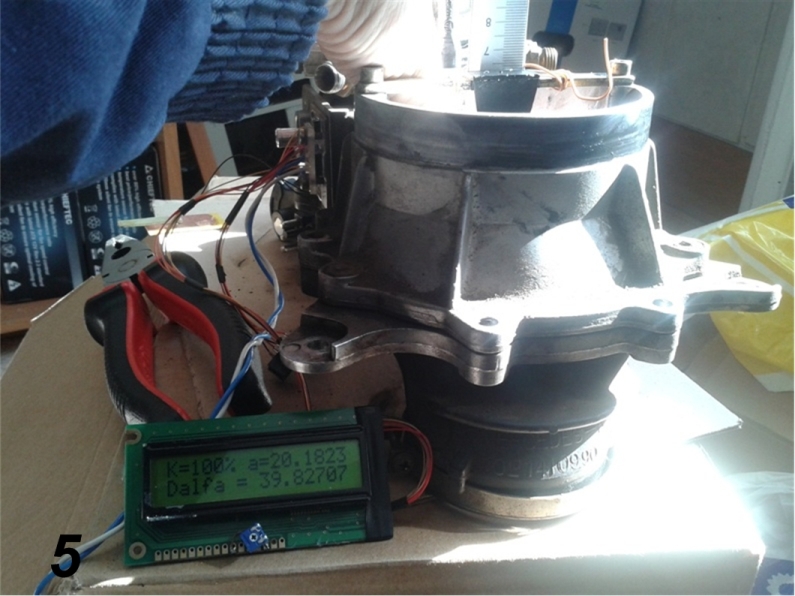
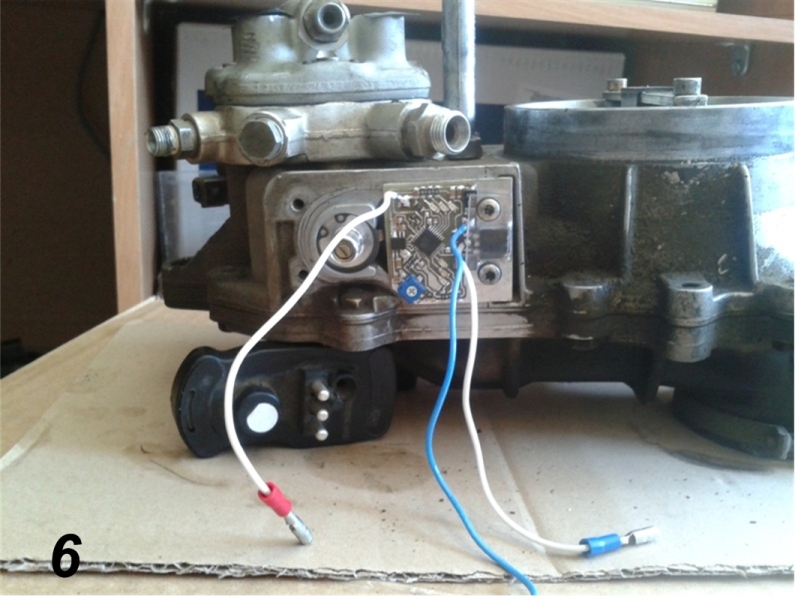
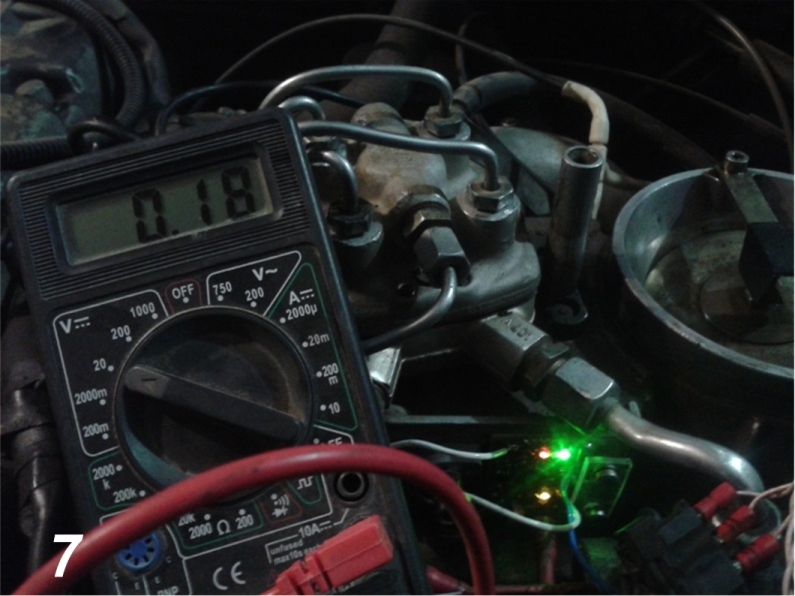
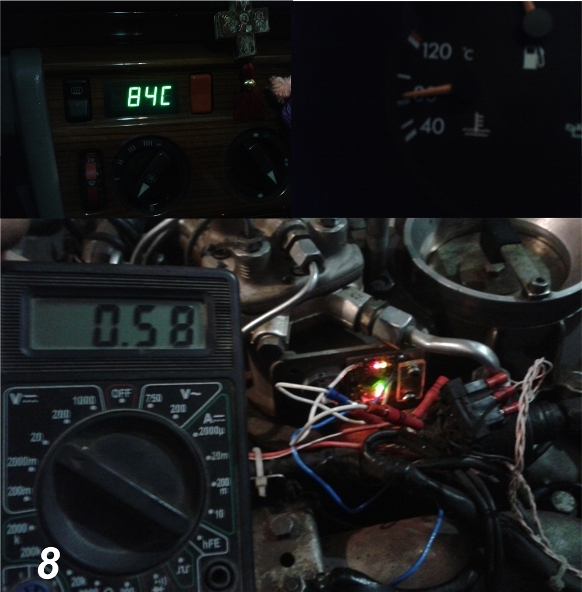
Всем доброго времени суток! Расскажу об очередном "колхозе" ПНД. Предыстория такова - собрал и успешно использовал на своём "мурзике" аналог виннерсовского эмулятора ПНД на основе датчика MPX4115. С мая по октябрь прошлого года. А с наступлением холодов выявилась проблемка - при температуре двигателя меньше 40 градусов и попытке тронуться машина просто глохла. Причина: у датчика (по даташиту) присутствует температурная ошибка, величина которой для каждого датчика своя. Хотел было заморочиться на калибровку эмулятора по температуре, но на глаза попался бесконтактный ДПДЗ украинского производства, собранный на микросхеме KMZ41. Почитав характеристики этого чуда (есть термокомпенсация) решил собрать себе магнитный ПНД. Оставался только вопрос по магниту, ведь стандартные не рассчитаны на температуру более 80 градусов, а мало ли... Но и эта проблема оказалась решаемой, оказывается есть разные марки магнитов с различной максимальной температурой использования. Заказал у производителя (в Питере) несколько штук неодимовых магнитов с температурными допусками до 120 градусов. На этом предыстория заканчивается, начинаем собирать. На микроконтроллере Atmega8 была спаяна схема (фото 1), для удобства снят дозатор и приклеен магнит (фото 2), вместо ПНД установлена наша плата с подключенным LCD для определения зависимости угла поворота от положения напорного диска и проведена калибровка (фото 3 - 5), на основе полученных данных и ранее снятой зависимости напряжения ПНД от глубины напорного диска сочиняем прошивку контроллера, отпаиваем LCD и припаиваем в нужные места светодиоды, возвращаем всё на дозатор (фото 6). Предварительная подготовка закончена, устанавливаем всю эту приблуду на машину. Проводим установку угла начального положения напорного диска (фото 7), запускаем и прогреваем двигатель, устанавливаем резистором нужное напряжение ПНД для ХХ (фото 8 ). Всё работает. Проверяем на ходу. Улыбаемся. Стоимость деталей на текущую дату составила около 300 рублей.

Ещё один ПНД
Автор
vital877
, 22 Mar 2017 09:04
Сообщений в теме: 42
#1
 ОФФЛАЙН
ОФФЛАЙН
vital877
-
- Начинающий
-

- Cообщений: 24
Любитель
- Город:Барнаул
-
Автомобиль:
w124
Отправлено 22 March 2017 - 09:04

- JH и Dan8584 это нравится
#2
ОФФЛАЙН
vlad_f_p
-

- Пользователи
-
- Cообщений: 67
Мерсовод
- Город:Ставрополь
-
Автомобиль:
W201
Отправлено 07 April 2017 - 14:23
Занимался подобной вещью. Сразу вопросики. У датчиков типа KMZ магнит расположен в центре микросхемы и вращается вокруг своей оси. Два выхода SIN и COS функции угла поворота. На выходе после деления получаем tg и методом Кордика получаем угол поворота. Затем ШИМом получаем выходное напряжение. В данной конструкции магнит расположен фиг знает как. Второе, каково потребление тока контроллером, наверняка он посадит питание штатного датчика и там будет горазда ниже 4.85В. Работа проделана, это уже хорошо.
Я в конечном счете сделал проще. В штатном датчике наклеял дорожки от какого-то датчика с 10-ки. Они достаточно широкие и имеют линейную зависимость вых. напряжения от угла поворота. Потом преобразовал на микротоковом операционнике в функцию заводского датчика. Езжу полтора года, без проблем. Сразу установил и еще ни разу не заглядывал. Детали применил от промышленного оборудования с высокими допусками по температуре.
Прикрепленные изображения
MB190 4МКПП 1988г.
#3
ОФФЛАЙН
игорёха
 Мой гараж
Мой гараж
-

- Мерсоводы
-
- Cообщений: 13680
Вечно молодой,вечно пьяный!
- Город:КАЗ.ССРг.РУДНЫЙ
-
Автомобиль:
W201 был,VOLVO 760 сейчас.
Мой гараж
Отправлено 08 April 2017 - 07:40
Ой,где это я
Ну вы блин даёте.Молодцы!Но есть одно но, для процентов 95 на этом форуме,это космические разработки.
Ну вы блин даёте.Молодцы!Но есть одно но, для процентов 95 на этом форуме,это космические разработки.
Volvo 760GLE.83г.В28Е.К-Джет.АКПП.ПЭП.Клима,круиз,кожа.рожа и т.д
#4
ОФФЛАЙН
alex2
-

- Мерсоводы
-
- Cообщений: 4060
Легенда форума
- Город:Казахстан
-
Автомобиль:
w201✇✇✇
Отправлено 08 April 2017 - 08:15
Ммммм, А на каком они языке разговаривают, извиняюсь спросить
~~~$ Сеньор поZитив $~~~
✇ Мерседес 190 1.8 910 5мкпп 1992 г.в ✇


#5
ОФФЛАЙН
ed174
-

- Мерсоводы
-
- Cообщений: 1443
Ветеран
- Город:Челябинск
-
Автомобиль:
W124 1995г 2.0 л
Отправлено 08 April 2017 - 10:40
Ммммм, А на каком они языке разговаривают, извиняюсь спроси
Да пусть пообщаются
W124 1989 2.6л Мкпп
W124 1995 2.0л Мкпп
#6
ОФФЛАЙН
vlad_f_p
-
- Пользователи
-
- Cообщений: 67
Мерсовод
- Город:Ставрополь
-
Автомобиль:
W201
Отправлено 09 April 2017 - 20:27
Ну ладно поприкалывайтесь. А я реально езжу на таком датчике. Причем он по характеристике точ в точ как бошевский. Может как нибудь сниму, сфоткаю и покажу.
MB190 4МКПП 1988г.
#7
ОФФЛАЙН
alex2
-
- Мерсоводы
-
- Cообщений: 4060
Легенда форума
- Город:Казахстан
-
Автомобиль:
w201✇✇✇
Отправлено 09 April 2017 - 20:41
Ну ладно поприкалывайтесь. А я реально езжу на таком датчике. Причем он по характеристике точ в точ как бошевский. Может как нибудь сниму, сфоткаю и покажу.
Нее ничего личного просто это для нас НОУ ХАО
~~~$ Сеньор поZитив $~~~
✇ Мерседес 190 1.8 910 5мкпп 1992 г.в ✇
#8
ОФФЛАЙН
vital877
-
- Начинающий
-
- Cообщений: 24
Любитель
- Город:Барнаул
-
Автомобиль:
w124
Отправлено 10 April 2017 - 11:48
Занимался подобной вещью. Сразу вопросики. У датчиков типа KMZ магнит расположен в центре микросхемы и вращается вокруг своей оси. Два выхода SIN и COS функции угла поворота. На выходе после деления получаем tg и методом Кордика получаем угол поворота. Затем ШИМом получаем выходное напряжение. В данной конструкции магнит расположен фиг знает как. Второе, каково потребление тока контроллером, наверняка он посадит питание штатного датчика и там будет горазда ниже 4.85В. Работа проделана, это уже хорошо.
Я в конечном счете сделал проще. В штатном датчике наклеял дорожки от какого-то датчика с 10-ки. Они достаточно широкие и имеют линейную зависимость вых. напряжения от угла поворота. Потом преобразовал на микротоковом операционнике в функцию заводского датчика. Езжу полтора года, без проблем. Сразу установил и еще ни разу не заглядывал. Детали применил от промышленного оборудования с высокими допусками по температуре.
Всё несколько проще, чем кажется))) На фотках виден LCD дисплей, прикрученный именно для калибровки по месту, т.е. именно с "фиг знает как" расположенным магнитом. В итоге получается чёткая зависимость угла поворота магнита (даже установленного не по центру) от положения напорного диска.
Потребление тока при всех включенных светодиодах не превышает 40мА, но это вообще не критично, т.к. питание на стабилизатор 7805 берется от плюса зажигания.
По поводу вашей штуки у меня тоже возник вопрос - а как быть если усики ПНД разлохматились/износились/отсутствуют?
Ой,где это я
Ну вы блин даёте.Молодцы!Но есть одно но, для процентов 95 на этом форуме,это космические разработки.
И ещё процентов у семидесяти из этих 95 есть знакомый кулибин с паяльником  , способный при наличии схемы и прошивки просто повторить эти "космические разработки", тем более, что коммерческой составляющей здесь никакой не скрыто.
, способный при наличии схемы и прошивки просто повторить эти "космические разработки", тем более, что коммерческой составляющей здесь никакой не скрыто.
#9
ОФФЛАЙН
vlad_f_p
-
- Пользователи
-
- Cообщений: 67
Мерсовод
- Город:Ставрополь
-
Автомобиль:
W201
Отправлено 10 April 2017 - 17:26
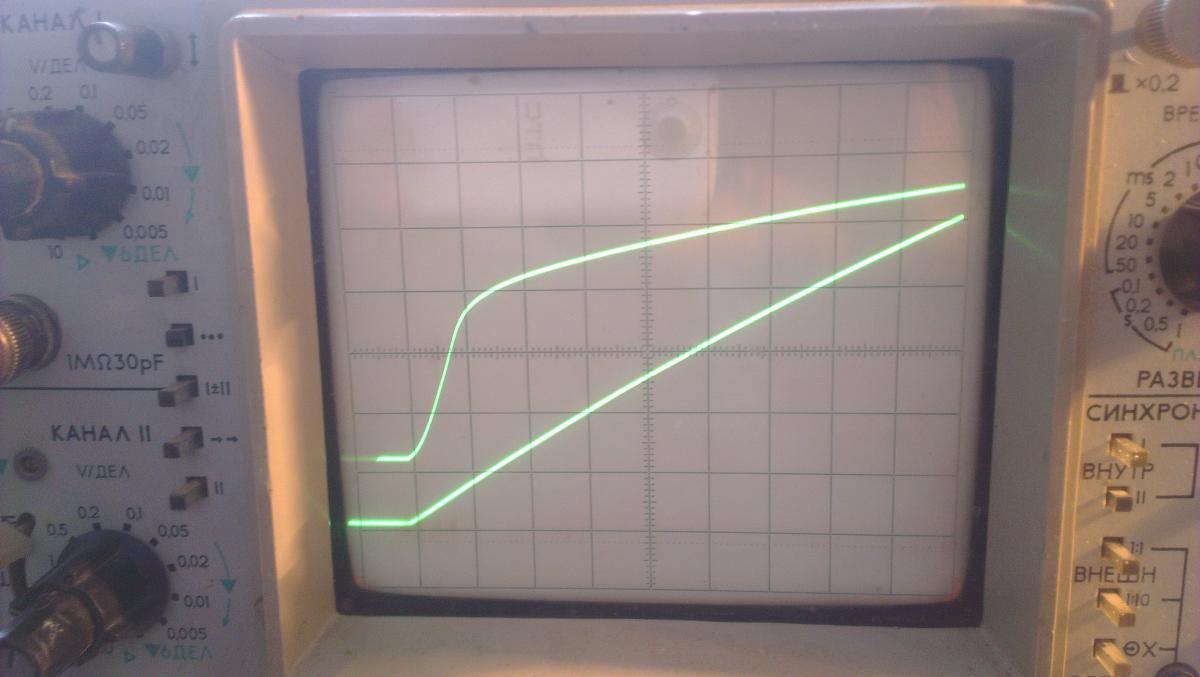
Для получения характеристики бошевского датчика я делал стенд со стрелкой примерно длиной 0.5м. Снял характеристику с точностью до градуса. Потом построил график. Свой датчик построил так чтобы он как можно точно повторил характеристику бошевского датчика. В динамике его работу видно на осциллографе где на вход подается линейное напряжение а на выходе имеем то что надо. Подавать дополнительное напряжение не надо, хватает того что подается на датчик.
Не понятно как ты юстировал свой датчик. Что будет если поменяются параметры магниты от температуры, сместить его в сторону, поменять полюса. Т.е. это как единичный экземпляр не для повторения. В датчике KMZ сделаны два датчика. И отношение величин сигналов с них величина постоянная не зависящая от величины магнитного поля. И зависит только от угла поворота. По какому закону они работают при таком расположении и перемещении магнита не понятно.
Сообщение отредактировал vlad_f_p: 10 April 2017 - 17:44
MB190 4МКПП 1988г.
#10
ОФФЛАЙН
vital877
-
- Начинающий
-
- Cообщений: 24
Любитель
- Город:Барнаул
-
Автомобиль:
w124
Отправлено 11 April 2017 - 13:10
Для получения характеристики бошевского датчика я делал стенд со стрелкой примерно длиной 0.5м. Снял характеристику с точностью до градуса. Потом построил график. Свой датчик построил так чтобы он как можно точно повторил характеристику бошевского датчика. В динамике его работу видно на осциллографе где на вход подается линейное напряжение а на выходе имеем то что надо. Подавать дополнительное напряжение не надо, хватает того что подается на датчик.
Не понятно как ты юстировал свой датчик. Что будет если поменяются параметры магниты от температуры, сместить его в сторону, поменять полюса. Т.е. это как единичный экземпляр не для повторения. В датчике KMZ сделаны два датчика. И отношение величин сигналов с них величина постоянная не зависящая от величины магнитного поля. И зависит только от угла поворота. По какому закону они работают при таком расположении и перемещении магнита не понятно.
А в чём, собственно, сложность-то? Подавать дополнительное напряжение? Да я никого не заставляю повторять данное устройство, это абсолютно необязательно, пользуйтесь своим, насколько его хватит. Как я калибровал и поменяются ли параметры магнита - читайте первое сообщение, там об этом уже написано. Что будет если поменять полюса магнита? Ничего не изменится согласно даташиту на KMZ41.
По какому закону работают мосты при расположении и перемещении магнита не по центру? Это не сильно интересует, т.к. ещё раз повторю: КАЖДОМУ положению напорного диска соответствует ЕДИНСТВЕННОЕ определение угла поворота магнита, а больше от этой микросхемы нам ничего и не требуется, дальше уже дело за прошивкой микроконтроллера. По поводу повторяемости: никто не мешает доработать прошивку и сделать устройство обучаемым. Считаю, что ответил на поставленные вопросы.
#11
ОФФЛАЙН
Отправлено 11 April 2017 - 13:30
Приветствую земляка! Плату сам травил или заказывал где-то? Текстолит в эскоре брал?
Сообщение отредактировал PampersW126: 11 April 2017 - 13:30
Шайтан машын W126 S500SEL черная кожа, корень ореха, климат.
Установлен OM606.910 DIESEL POWER!
#12
ОФФЛАЙН
vital877
-
- Начинающий
-
- Cообщений: 24
Любитель
- Город:Барнаул
-
Автомобиль:
w124
Отправлено 11 April 2017 - 14:03
Приветствую земляка! Плату сам травил или заказывал где-то? Текстолит в эскоре брал?
Привет! Сам, текстолит - в Эскоре ![]()
#13
ОФФЛАЙН
vlad_f_p
-
- Пользователи
-
- Cообщений: 67
Мерсовод
- Город:Ставрополь
-
Автомобиль:
W201
Отправлено 11 April 2017 - 16:01
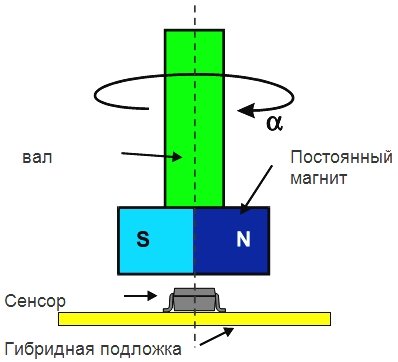
Картинка как работает датчик.
Прикрепленные изображения
MB190 4МКПП 1988г.
#14
ОФФЛАЙН
vital877
-
- Начинающий
-
- Cообщений: 24
Любитель
- Город:Барнаул
-
Автомобиль:
w124
Отправлено 12 April 2017 - 15:33
Картинка как работает датчик.
Всё правильно и сенсор способен измерять угол 0-180 градусов. При этом, если развернуть магнит наоборот (поменять полюса местами), то наш угол не изменится. Поправьте, если ошибаюсь.
#15
ОФФЛАЙН
vlad_f_p
-
- Пользователи
-
- Cообщений: 67
Мерсовод
- Город:Ставрополь
-
Автомобиль:
W201
Отправлено 12 April 2017 - 17:36
Всё правильно и сенсор способен измерять угол 0-180 градусов. При этом, если развернуть магнит наоборот (поменять полюса местами), то наш угол не изменится. Поправьте, если ошибаюсь.
Да угол не изменится. Может быть поменяется знак, надо изучить подробнее. Но смысл в том что магнит должен вращаться вокруг датчика, а не двигаться вдоль него. Датчик то по любому будет реагировать, но вот по какому закону и как потом из этого получать угол поворота или какую-то функцию зависимости сопротивления датчика от перемещения магнита. Это не объяснимо. В таком случает не будет соблюдаться независимость показаний датчика от величины магнитного поля. Как единичный экземпляр можно. При повторении надо будет все калибровать заново и переписывать таблицу, наверняка применен табличный метод преобразования.
MB190 4МКПП 1988г.
#16
ОФФЛАЙН
vital877
-
- Начинающий
-
- Cообщений: 24
Любитель
- Город:Барнаул
-
Автомобиль:
w124
Отправлено 12 April 2017 - 17:57
... надо изучить подробнее...
можете не изучать, угол не меняется, проверял при разных положениях полюсов. Магнит движется не вдоль датчика а радиально (усы ПНД движутся по радиусу), соответственно и угол меняется, иначе (при движении магнита вдоль) смысла вся затея бы не имела. Напряженности магнитного поля примененного магнита хватает даже для определения угла с зазором в 1см от сенсора, а здесь сдвиг от центра сенсора составляет не более 2-3 мм.
#17
ОФФЛАЙН
vlad_f_p
-
- Пользователи
-
- Cообщений: 67
Мерсовод
- Город:Ставрополь
-
Автомобиль:
W201
Отправлено 12 April 2017 - 20:36
можете не изучать, угол не меняется, проверял при разных положениях полюсов. Магнит движется не вдоль датчика а радиально (усы ПНД движутся по радиусу), соответственно и угол меняется, иначе (при движении магнита вдоль) смысла вся затея бы не имела. Напряженности магнитного поля примененного магнита хватает даже для определения угла с зазором в 1см от сенсора, а здесь сдвиг от центра сенсора составляет не более 2-3 мм.
Да правильно магнит движется радиально. Радиальное движение это движение по радиусу к центру круга или от центра. Для правильной работы магнит должен вращаться вокруг своей оси и эта ось должна проходить через центр датчика. Все остальное я написал в прошлом посте.
Пусть форумчане делаю вывод.
MB190 4МКПП 1988г.
#18
ОФФЛАЙН
persona_non_grata
-
- Мерсоводы
-
- Cообщений: 6843
Легенда форума
- Город:Витебск
-
Автомобиль:
Велик colnago
Отправлено 12 April 2017 - 21:07
Для правильной работы магнит должен вращаться вокруг своей оси и эта ось должна проходить через центр датчика.
Будет другая зависимость сигнала от положения магнита, в чём проблема?
Велик colnago 
#19
ОФФЛАЙН
vlad_f_p
-
- Пользователи
-
- Cообщений: 67
Мерсовод
- Город:Ставрополь
-
Автомобиль:
W201
Отправлено 12 April 2017 - 21:29
Будет другая зависимость сигнала от положения магнита, в чём проблема?
Да как раз то дело в то что это датчик угла поворота, не силы магнитного поля. В его принципе заложено то что он показывает поворот магнита. Изменение силы магнитного поля не влияет на эти показания. Т.е. магнит можно ложить на микросхему или поднимать на 1 см. Но если не вращаешь вокруг своей оси, то ничего не изменится. Здесь, возможно, правильнее использовать датчик Холла или что-то подобное что будет
измерять силу магнитного поля при перемещении магнита.
MB190 4МКПП 1988г.
#20
ОФФЛАЙН
janikvovan
-
- Мерсоводы
-
- Cообщений: 3671
Легенда форума
- Город:Ильичевск Украина
-
Автомобиль:
w124 2,6 КЕ
Отправлено 12 April 2017 - 21:33
Вот так почитаешь и идешь отваливать бешенные деньги за ПНД Бош. 

Сообщение отредактировал janikvovan: 12 April 2017 - 21:34
W 124 2,6 КЕ 1988гв тел 097 075 50 49 WDB 1240261A681237



Количество пользователей, читающих эту тему: 0
0 пользователей, 0 гостей, 0 анонимных

